

Ukubuka konke Kwesistimu
Uhlelo lokukala isisindo olungami luhlinzeka ngokuyinhloko imisebenzi yesicelo sebhizinisi yeziteshi zokuthola ukulayishwa ngokweqile komgwaqo ezingashintshi. Isebenzisa ngokuyinhloko izindlela zokuphoqelela okungaxhunywana nazo, ithembele emishinini yokuhlola kusengaphambili ukuze iqedele ukutholwa nokukala isisindo sezimoto zokuthutha impahla. Isistimu ingashicilela ulwazi olugcwele kakhulu kanye nedatha yohlu oluvinjelwe ngamabhodi emilayezo ahlukahlukene, futhi ilawula izinqubo zebhizinisi ngedijithali isebenzisa isofthiwe yesiteshi esingaguquki sokuthola ukulayishwa ngokweqile komgwaqo.
Isakhiwo Esijwayelekile
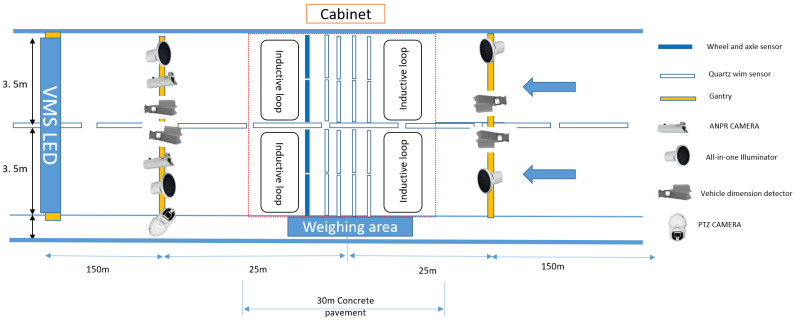
Incazelo Yomsebenzi
● Ezimotweni ezidlula emzileni onguthelawayeka, isistimu yokukala ingakwazi ukubona ngokuzenzakalelayo isisindo semoto esiphelele, isisindo se-ekseli, inani lama-ekseli namathayi, ibanga le-ekseli, isivinini semoto, nokusheshisa kwemoto.
● Uhlelo lungakwazi ukuhlukanisa izimoto ngokunembile nangempumelelo futhi lusingathe izimo zokushayela ezingavamile njengokuma komugqa wezimoto nokushintsha umzila, okuqinisekisa ukuxhumana phakathi kwezimoto nedatha.
●Isistimu inomsebenzi wokubhafa ozenzakalelayo, oyivumela ukuthi igcine inani elithile ledatha. Uma ukudluliswa kwedatha kukhompyutha elayisha kakhulu eseceleni komgwaqo kwehluleka, isistimu ingaphinda ithumele idatha, iqinisekise ukuhluka kwedatha kanye nobuqotho.
● Ulwazi lwesisindo lungadluliselwa kukhompuyutha yokulawula engemuva ngokusebenzisa isixhumi esibonakalayo sedatha.
●Isistimu inomsebenzi wokuzihlolela iphutha, futhi uma kwenzeka noma iyiphi impahla noma ukwehluleka komugqa, isistimu ingathola ulwazi lwephutha oluhambisanayo.
●Isistimu ingahlangabezana nezidingo zokusebenza okungaphazamiseki, okuqhubekayo, kanye nesimo sezulu sonke ngemodi engagadiwe.
●Ezimotweni ezingama-semi-trailer ezinamalayisense angaphambili nangemuva angahambisani, isistimu yengeza okokusebenza kokuthwebula imoto yangemuva ukuze ithwebule kokubili ipuleti lelayisense elingaphambili kanye ne-trailer plate.
●Isistimu ingathwebula izithombe ezimbili zesici se-panoramic zezimoto ezilayishwe ngokweqile (okuhlanganisa ukubuka okugcwele kwemoto, inombolo yelayisense, umbala, imodeli, nezici zendawo ezivelele).
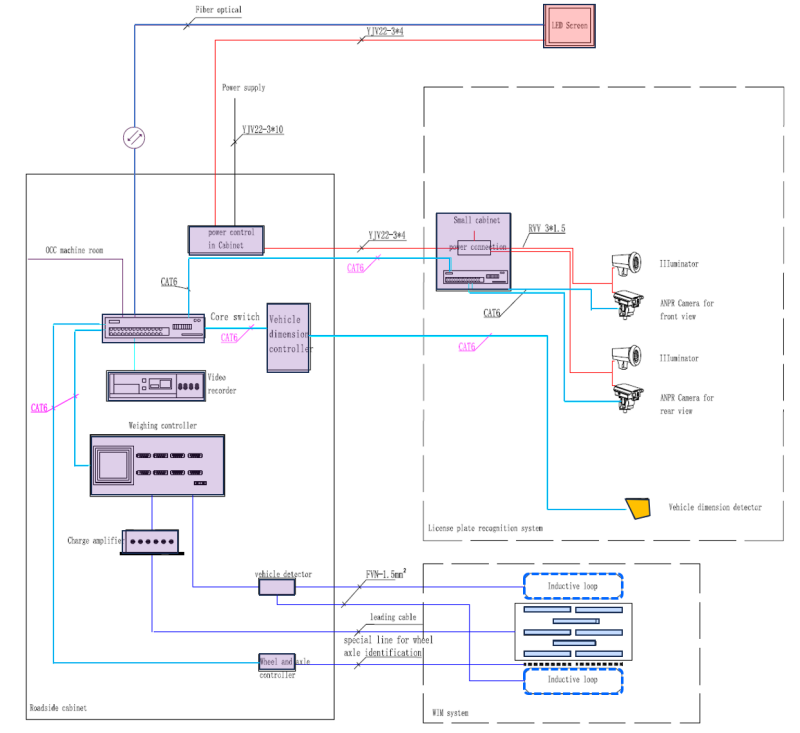
Izingxenye Zesistimu
Uhlelo lokukala isisindo olungami luhlanganisa uhlelo lokukala olunesivinini esiphezulu esiguquguqukayo, uhlelo lokuhlukanisa izimoto, uhlelo lokuqaphela imoto, uhlelo lokubhekwa kwevidiyo eseceleni komgwaqo, uhlelo lokukhishwa kolwazi oluseceleni komgwaqo, kanye nohlelo lokuhlanganisa ulwazi lomgwaqo.
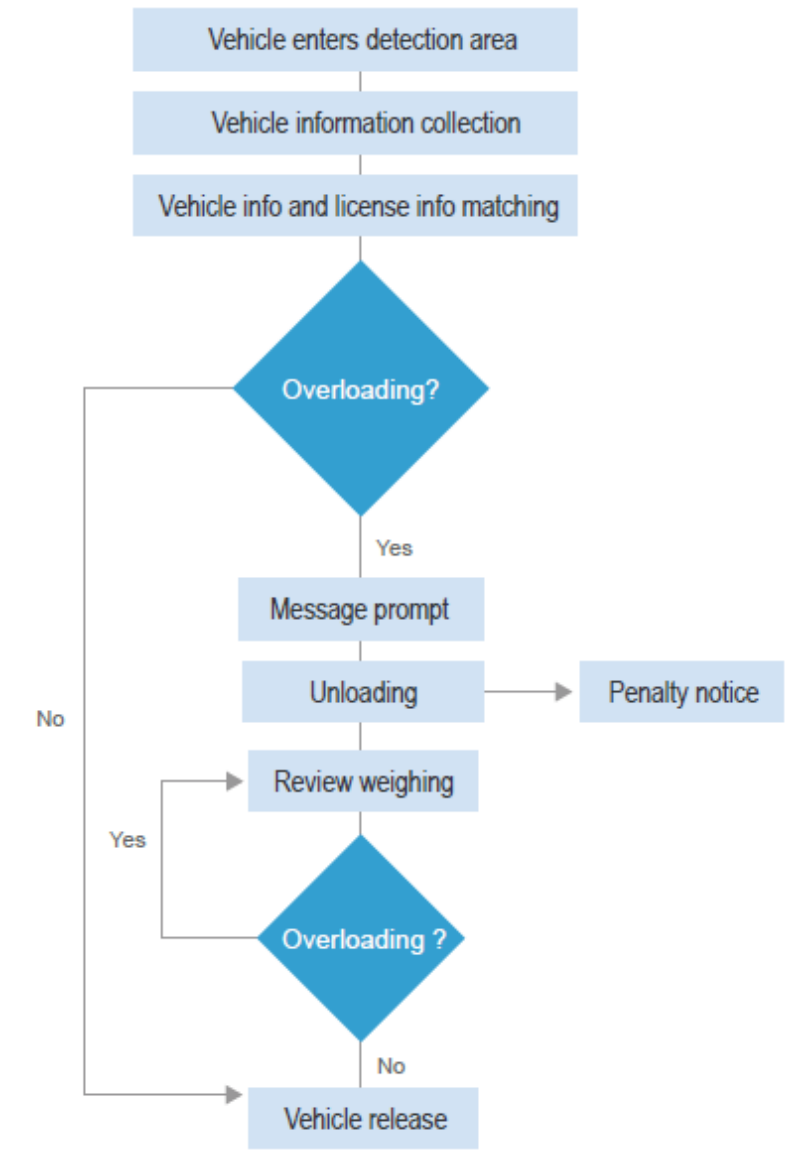
Umdwebo Wenqubo Yokuphoqelela Ukukala Okungami
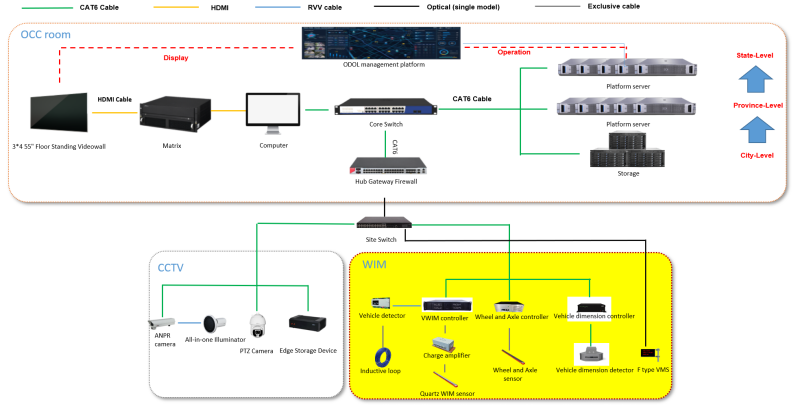
Uhlelo lwe-Topology Diagram
Izinkomba Eziyinhloko Zezobuchwepheshe
● Ubukhulu bomthwalo we-ekseli (noma iqembu le-ekseli): 40,000 kg
●I-axle encane yomthwalo (noma iqembu le-ekseli): 500 kg
● Inani lokuthweswa iziqu: 50 kg
● Ibanga lesivinini sokutholwa kwe-Dynamic: 0.5–200 km/h
●Izinga lokunemba kwesisindo esiguqukayo: Ibanga lesi-5
● Izinga lokuthwebula amapuleti elayisensi yesikhathi sasemini: ≥98%
● Izinga lokuthwebula amapuleti elayisensi yasebusuku: ≥95%
● Ukuqashelwa kwepuleti lelayisense nokunemba kokufakanisa idatha yesisindo: ≥99%

Inkampani engu-Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Ihhovisi laseChengdu: No. 2004, Unit 1, Building 2, No. 158, Tianfu 4th Street, Hi-tech Zone, Chengdu
Ihhovisi laseHong Kong: 8F, Cheung Wang Building, 251 San Wui Street, Hong Kong
Isikhathi sokuthumela: Sep-13-2024




